
ARTICLE by Alice Butler of Farmanco
IMAGE: Wind erosion caused by prefrontal wind ahead of a rain event on the Eyre peninsula (photo: Wes Matthews & Michael Eyres).
Key points
- The navigation of complex paddocks can be challenging for casual staff.
- Creating routes to demonstrate the most efficient way to navigate a paddock can improve operational efficiency.
- Optimising run lines can reduce paddock operation time, as much as 2.5 hours for a single paddock in some instances.
Background
We are now one year into the three-year GRDC project ‘On-farm Operations Optimisation’ that uses the Verge Path Planning software called Launch Pad to help growers increase efficiencies on Australian farms. The project has engaged 16 case study farmers from across the GRDC Regions of Australia (6 Western Region, 4 Southern Region and 6 Northern Region), with farm sizes ranging from 3,000 ha to greater than 20,000 ha. Approximately 30% of the growers are using fully matched controlled traffic farming (CTF). The variation in farm size allows us to understand current challenges for businesses at a range of farming scales. Feedback from these Australian growers has led Verge Ag to develop wheel traffic calculator and route planning products, make updates to the overlap percentage calculations, and plan future development for farm layout planning. Two case studies that centre around increasing time efficiency, one on Path Planning on the Eyre Peninsula and another on Route Planning in the Esperance Port Zone, are detailed below. Path planning produces the most efficient direction of tramlines (i.e. AB line in GPS guidance) and Route Planning gives the most efficient sequence of working by giving directions to turn left or right to optimise operations.
Eyre Peninsula – Path Planning
Wes and Karen Matthews farm in a dune swale system on the Eyre Peninsula and were interested in updating run lines to increase time efficiency. Launch Pad can determine the most efficient run lines using a paddock boundary. The software determines the most efficient run lines by calculating the least number of tracks, the shortest distance travelled, and the shortest time to complete.
When the grower uploaded their farm boundaries to Launch Pad, there were a total of 192 run lines for one particular paddock (Figure 1). When the software generated new run lines based on the shortest distance travelled, the direction of the run lines changed from running north-south to running west-north-west to east-south east. The total number of tracks reduced by 42, from 192 to 150 tracks, saving roughly 2.5 hours of working time within that paddock (Figure 2).

Figure 1. The original layout had a total of 192 tracks running in a north-south direction.

Figure 2. Optimised run lines using Verge Path Planner had a total of 150 tracks running in a west-north-west to east-south-east direction and saved 2.5 hours in operations time.
Unfortunately, after the changed layout was implemented, the paddock was impacted by strong prefrontal winds ahead of a storm, resulting in severe wind erosion (Figure 3). This demonstrates the need to balance time efficiency with landscape risks. Currently Launch pad can be used to understand slope and therefore potential water erosion, however it does not account for wind erosion. To address this, the grower will refine their initial efficiency
focused approach and develop internal paddock boundaries with different run line directions that reduce the vulnerability to wind erosion without compromising overall efficiency.
The software can help identify zones within the paddock where adjustments can be made, such as avoiding long, straight runs to better manage wind erosion, while balancing ease of travel and the impact on other operations.
Esperance Port Zone – Route Planning
CTF involves growers confining machinery wheel traffic to a designated set of tracks and thereby reducing the area of soil that is compacted during field operations. Adoption of CTF has required growers to develop a master set of run lines and boundaries ensuring machinery guidance keeps wheel traffic to the designated tracks. Although this creates some parameters of where to drive, operators still have flexibility to choose how they navigate these run lines, in terms of direction of travel and selection of the next run line. This can create inefficiencies, especially for complex paddocks with lots of internal obstacles. By determining the most efficient route within a paddock, growers can provide improved guidance for machinery operators, some of which may be casual staff members that have never been in the paddock before.
For the Egan family, who farm in the Esperance Port Zone, salt lakes, a dominant feature in the landscape, create lots of internal obstacles. These obstacles can increase overlap, leading to unnecessary wastage of inputs and increased operational time. This is particularly
relevant for casual staff who are not familiar with the paddocks. To improve operational efficiencies and navigation, they have recorded historical application videos for casual staff.
As efficient navigation of paddocks in this region can be a challenge, Launch Pad potentially has a role. The boundary for paddock T1 was uploaded into Launch Pad to determine the most efficient run line. The most efficient run lines follow the longest edge of the paddock, which is consistent with how the grower currently navigates this paddock in their CTF system (Figure 4.). Using the most efficient run line, Launch Pad identified the most efficient route (Figure 4.). With the flexibility to select the start and end points, the software calculates the quickest route through the paddock. These routes can also be exported to a mobile device for taking out to the field (Figure 5.).

Figure 4. Verge pathway planning software identifies the most efficient run lines to navigate the paddock (top). It also determines the shortest route based on these optimised run lines (bottom). The colours of the arrows indicate start to finish. Green are the run lines at the beginning of the route, these transition to brown and then red are the final run lines.
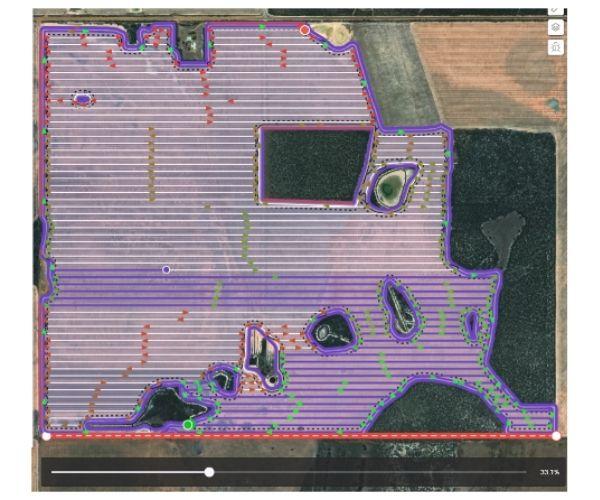

Figure 5. Launch Pad route output on a mobile device.
Grower feedback from the route demonstration has helped direct improvements for the Verge Ag development team. A key suggestion was to provide changes in paddock efficiencies or work rate (ha/hr), making it easier to identify less efficient areas. The grower knows that in salt lake country they are about 60% as efficient compared to the more open areas of the paddock, at a working speed of roughly 9 km/hr. By highlighting the less efficient areas of the paddock this can inform changes in future management.
Other considerations they outlined were:
- Inputting refill points within the software so casual staff can understand the most efficient time to navigate back to a refill point, so that time and fuel isn’t wasted,
- In narrow sections it is easiest to turn around going from the long run to the short run and then skip row, so triangles aren’t left in the paddock, and
- In the areas with a high number of salt lakes the sprayer can get stuck and must reverse to turn around if they don’t come into the section a certain way.
Conclusions
Using Path Planning software, such as Launch Pad, can help identify the most efficient run lines to reduce time spent in the paddock. Efficiency needs to be balanced with other landscape risks, such as wind erosion, to ensure that the paddock is managed effectively.
Routes will help improve staff management and operation efficiency, especially for inexperienced casual staff. Determining the most efficient route from the most efficient run lines is a work in progress and further parameters for machine turning, when to return to a refill station, avoiding areas where a machine will get stuck and understanding productivity or paddock efficiency will help to define the most efficient route.


Acknowledgements
Project VER2304-001RTX Through the Grain Automate initiative, Grains Research and Development Corporation (GRDC) has partnered with Verge Ag and the Australian Controlled Traffic Farming Association to support the acceleration and adoption of machine automation, autonomy and digital technologies in the Australian grains industry.
The research undertaken as part of this project is made possible by the significant contributions of growers through both trial cooperation and the support of the GRDC, the author would like to thank them for their continued support.