
CTF in Sugarcane
by Chris Norris and Jeff Tullberg
Whilst ACTFA ’s efforts have largely focused on grain, being the industry with the greatest CTF adoption, sugarcane experiences offer some interesting insights. This article is based on discussions with two very progressive sugarcane growers at Condong in northern NSW, Mark North and Dave Bartlett.
Firstly, a bit of background to sugarcane.
Sugarcane is grown as a row crop, which after planting is typically harvested annually, with 3-4 ratoon crops being grown before reducing productivity makes rejuvenation (replanting) necessary. Around the world, traditional cultivation practices used row spacings varying from about 0.9-1.4 m, depending on crop yield potential and the type of draft animal used for crop husbandry operations. In Australia, 1.4 m row spacing was widely adopted with horses being the draft animal of choice. This row spacing was maintained with the adoption of tractors.
The rapid development of machine harvesting in the 1960’s and 1970’s created new challenges. Manufacturers quickly standardised on machines designed to harvest a single row, with a gauge width of approximately 1.83 m (6 ft), This was driven by machine capacity and road transport considerations. To allow the passage of harvest and transport equipment, most production areas that moved to machine harvesting adopted 1.4-1.5 m row spacing to allow the machines to “fit” between the rows.
Resistance to wider row spacings was driven by fears of reduced yield. Because of high yields (70-150 t/ha in Australia), many machine passes occur in each interspace. Typically, >90% of the field is compacted by the multiple wheel passes that occur during harvest. A modern harvester weighs over 20 t, and the loaded weight of a modern haulage unit can exceed 30 t, with axle weights of up to 10 t.
Almost universally, sugarcane yields have either plateaued or reduced since the introduction of machine harvesting. Australian yields now are similar to the yields achieved in the 1970’s before full machine harvesting, despite significant advances in agronomy, breeding etc. A major research program was undertaken in the 1990’s to investigate the cause of this ’yield decline / plateau‘. Whilst significant and complex issues were identified, one of the most significant primary causal factors was identified as soil compaction. Whilst aggressive tillage during the rejuvenation program, along with high inputs, can produce very high yields from the replanted crop, the rapid reduction in ratoon yield impacts industry profitability.
Matching machinery gauge width and crop row spacing was considered the obvious solution to manage compaction, with permanent traffic lanes having benefits for trafficability under wet harvesting conditions. Although adoption was initially promising, commercial results fell far short of the outcomes indicated by research. The complexities of the agronomic systems, such as “dual row” planting (to maintain crop population density at wider crop interspaces), and issues with the length of the delivery elevator on the harvester caused many to revert to traditional systems. Industry research bodies did not adequately support the transition or assist in the understanding of the difficulties encountered and the determination of appropriate solutions. Currently about one third of the industry has adopted the concept of matched machinery gauge and crop row configuration. Whilst benefits are noted, the observed magnitude of benefits does not drive wider adoption.
The Mark & Dave story
Enter a small group of genuine innovators who sought to understand the issues and address them. Condong growers, Dave Bartlet and Mark North, observed that even when crop row spacing is matched with standardised machinery, a large proportion of the field is still compacted. This is due to a combination of the large number of machine passes during harvest and driver error, which can be as high as +/- 300 mm and is seldom less than +/- 150 mm. They made the decision that, if controlled traffic was going to work, they needed to control the position of all equipment in the paddock with GPS guidance. They were the first growers in the world to fit GPS Autosteer on both the harvester and all cane haulage equipment, in conjunction with matching the track gauge of all machinery with the crop row spacing. These changes reduced the area compacted at each harvest from >90% to less than 35% (Table 1).

Table 1. % of field compacted by traffic as determined by guidance used.

Fig 1a: A common situation when heavy rain interrupts the harvest with conventional farming practices (conventional 1.5m row spacing).

Fig 1b: The use of controlled traffic with well compacted permanent traffic lanes (1.9m spacing) gave excellent trafficability for the harvesting operation, with both bed tillage and application of mill mud as an ameliorant having been also undertaken since harvest.
There was further significant rain after harvest and the photos were taken more than a month after harvest. Whilst both farms regularly achieve high yields in the plant crop, the deterioration in yields of the ratoon crop is much more rapid with conventional farming systems.
This effect is well illustrated by Fig 2. The data show the averaged yields for Mark’s farm and the farms Dave manages. Between them they produce over 20% of the cane supply for Condong mill. The yields for re-planted crop (P) are similar to conventional farms in the area, with the yields of both groups being above the mill average. The ratoon yields of conventionally farmed areas actually reduce more rapidly than indicated in Fig 2, as fields which are not performing will be “ploughed out early” and only better yielding fields taken through to ratoon for another crop. Few crops go past three ratoons. The controlled traffic farmers are able to develop their farming rotations around typically 6 ratoons (7 harvests) without fear of accelerated yield decline. They also include a fixed legume fallow between the seventh harvest and replant. This benefits soil health and dramatically reduces the fertiliser requirements for the replant cane crop.
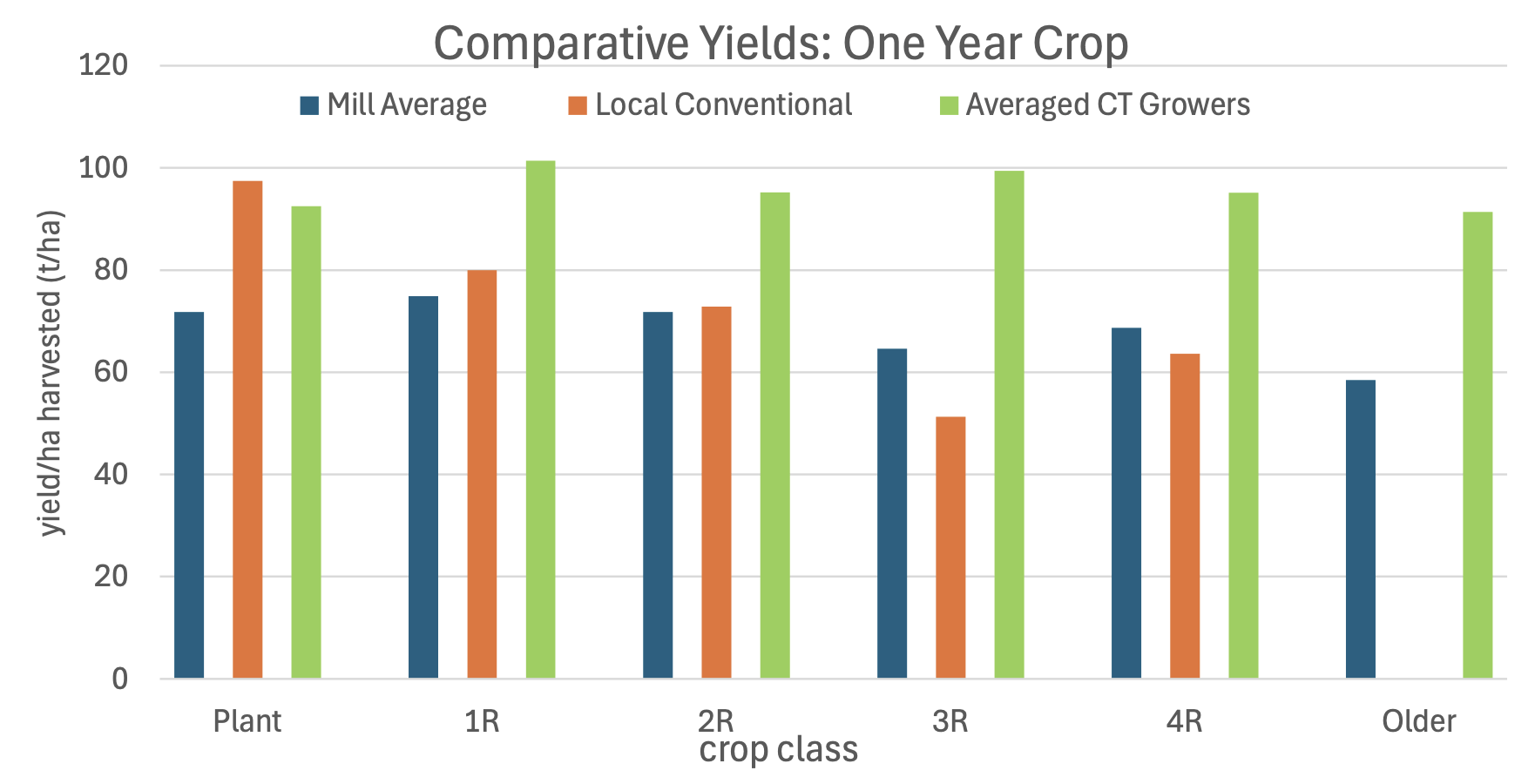
Figure 2. The overall farm yield for the different ratoons averaged for both Mark & Dave’s farms vs conventionally farmed properties in the immediate area and the mil (district) average (Data supplied M Warren, Sunshine Sugar).
The success of the complete system, including the necessity for GPS autosteer on all machinery that enters the field, is being noted. In recent years several growers in the area have commenced adopting the ‘full system‘. Further north, in the Rocky Point mill production area, over half of the growers have now moved to full adoption of the system and are noting similar benefits.
There is, however, a long way to go. A 2019 industry survey found that whilst approximately one third of the industry had matched machinery and crop row spacing, << 5% of the industry had GPS Autosteer. Increasing uptake of GPS Autosteer and the adoption of fully matched equipment and crop row configuration is seen as a significant potential ’step change‘ for the industry.
Are there lessons here for the grain industry?
Traffic on grain paddocks can be heavier, but with fewer traffic events per harvest, and wet harvests are probably not as common. On the other hand, as said many times, ’most soil damage occurs on the first heavy pass’. Would we find significant differences between growers with and without RTK precision on chaser bins? And more broadly, would a longer-term study of precision CTF effects demonstrate greater effects?